| 学科专业评审组: | 动力电气组 | | 项目名称: | 机器人关节智能电驱动机构关键技术及应用 |
| 提名单位: | 陕西省科学技术厅 |
| 提名等级: | 一等奖 |
| 提名单位意见: | 本项目突破了一种机器人关节智能电驱动机构多物理场协同设计技术,提出了一种多场耦合的智能电驱动机构多目标优化方法,构建了智能电驱动机构一体化电-磁-热多场耦合模型。项目突破了一种高爆发智能电驱动机构的损耗优化控制技术,提出了一种机器人复杂任务场景下电驱动机构高过载高动态响应技术,设计了一种基于自抗扰控制的智能电驱动机构高频响转矩控制策略。项目突破了复杂扰动下基于参数自适应的状态预测技术,提出了基于多时间尺度理论的智能电驱动机构参数辨识方法,设计了一种机器人关节智能电驱动机构复杂扰动下状态预测技术。
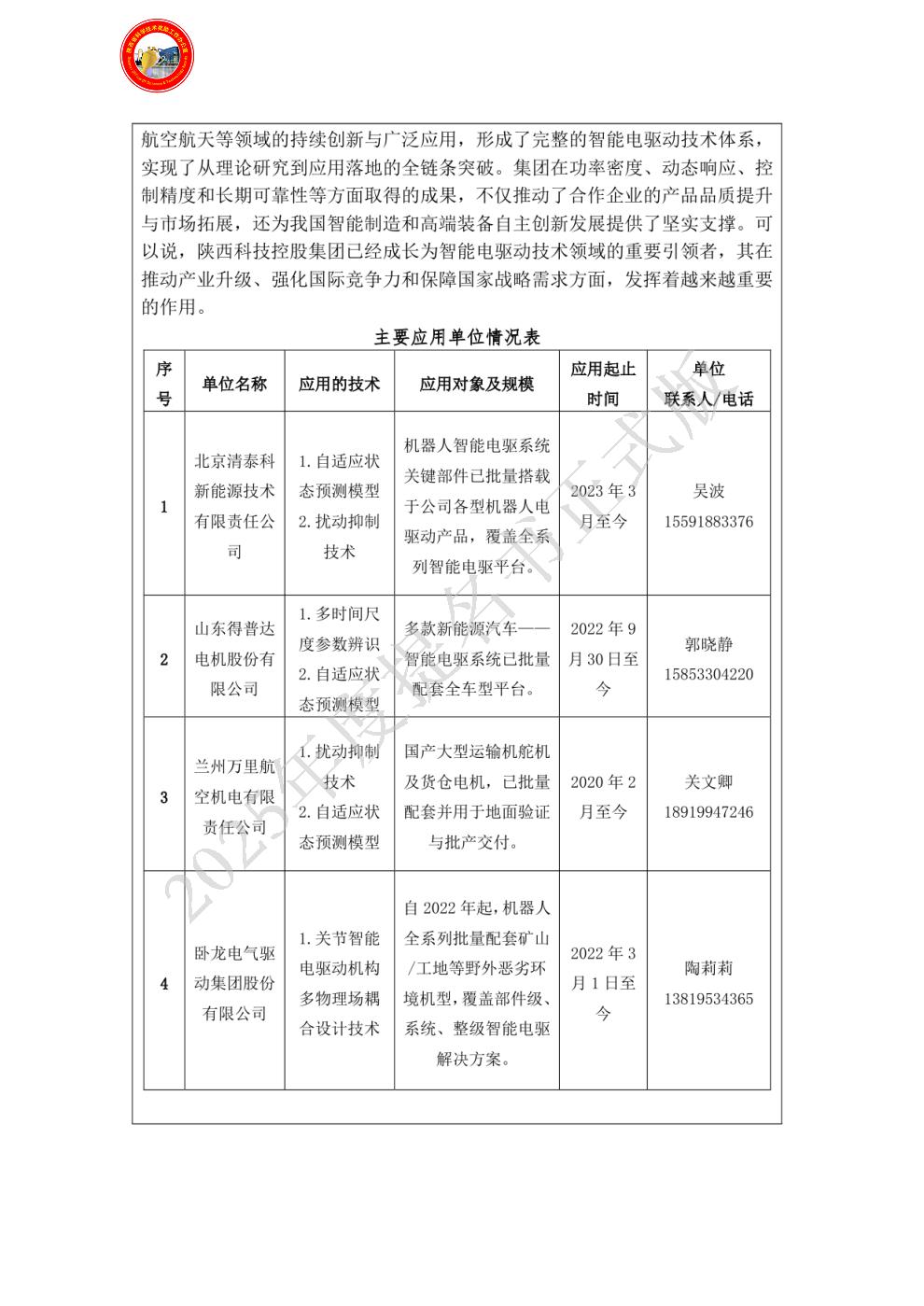
研究成果广泛应用于航空航天设备、工业机器人等重大项目工程中,经济效益和社会效益显著。本项目通过提升机器人电驱动机构性能,提升了机器人系统的运动特性和可靠性,降低了能耗与维护成本,提升了国产高性能驱动部件的竞争力,实现了战略价值与经济效益的双重突破。项目突破了机器人关节智能电驱动机构的技术瓶颈,提升了我国机器人产业的自主创新能力和核心竞争力,对推动智能制造装备升级、保障产业链安全具有重要战略意义。
项目成果材料齐全、规范,无知识产权纠纷,人员排序无争议,符合陕西省科技进步奖提名条件。
提名该项目为陕西省科学技术进步奖一等奖。
|
| 项目简介: | 
|
| 客观评价: | 
|
| 应用情况和效益: | 
|
| 主要知识产权和标准规范等目录: | 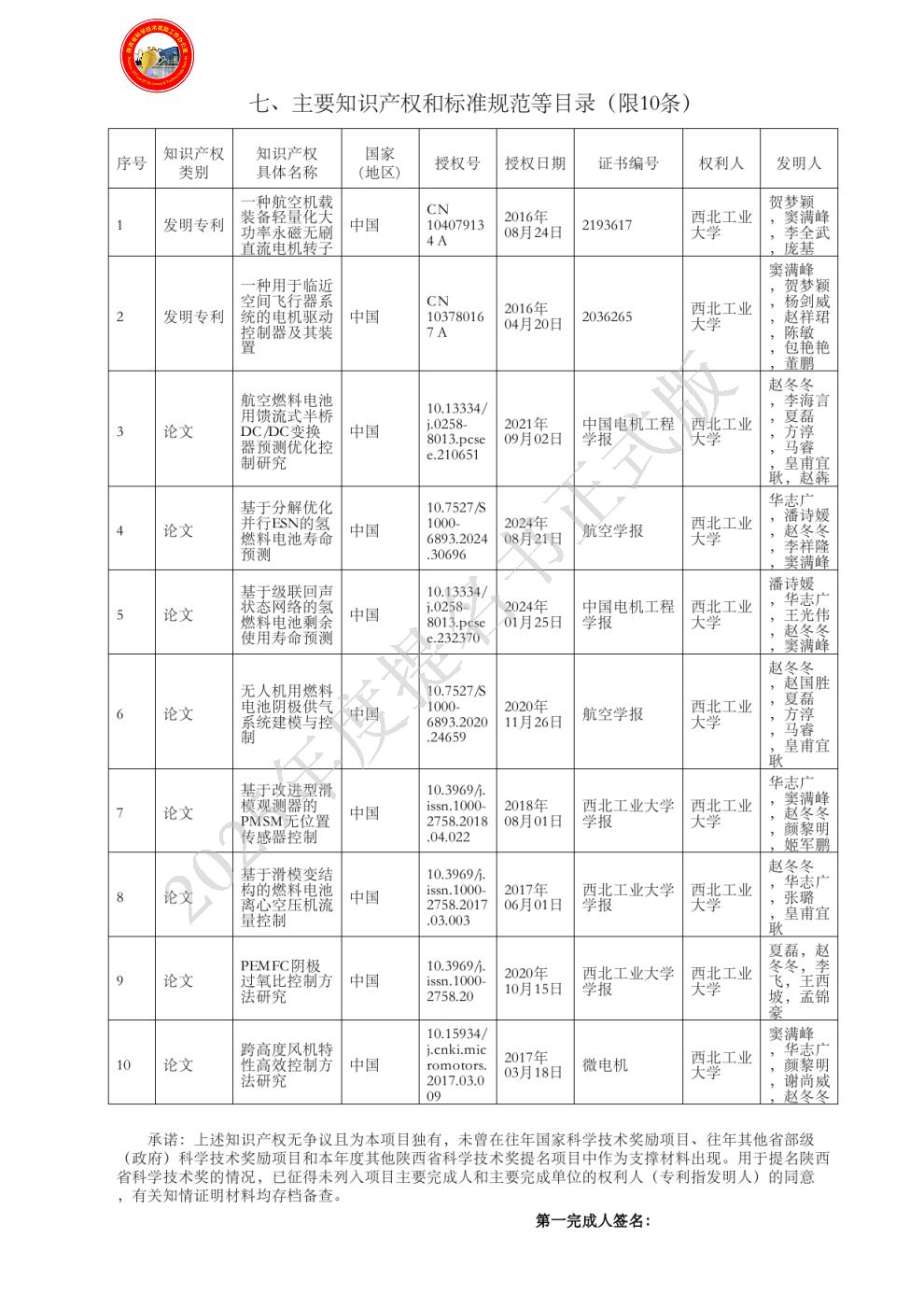 |
| 主要完成人: | - 姓名:窦满峰
排名:1
行政职务:无
技术职称:教授
工作单位:西北工业大学
对本项目技术创造性贡献:构建机电驱动机构一体化电-磁-热多场耦合模型,针对模型中电磁损耗与热传导的耦合关系优化磁路与热路参数匹配,实现温度场分布预测精度提升至95%以上,关键部位温度误差控制±5℃,支撑创新点1“温度场预测精度”指标突破,证明材料见附件一(1)。
曾获国家科技奖励情况:无 - 姓名:周吉峰
排名:2
行政职务:党委书记、董事长
技术职称:教授级高工
工作单位:陕西科技控股集团有限责任公司
对本项目技术创造性贡献:围绕“极端工况磁材-电机耦合特性”展开统筹管理,建立跨学科协同平台,分层迭代协调电磁、热、机械多域模型,研究驱动机构材料属性对扭矩密度与温升的影响关系,提升驱动控制器整体性能,促进产品的推广及应用。
曾获国家科技奖励情况:无 - 姓名:许爱国
排名:3
行政职务:党委书记、 董事长
技术职称:高级工程师
工作单位:西安微电机研究所有限公司
对本项目技术创造性贡献:负责组织攻克极端工况下驱动机构寿命优化,建立热-应力-寿命关联模型结构改进方案。打破传统技术路径局限,为项目划定了兼具可行性与前瞻性的研发方向,避免了技术研发的盲目性。整合跨领域资源,攻克关键技术壁垒,牵头搭建 “产学研用” 协同创新平台,联动西北工业大学自动化学院组建跨领域研发团队。推动技术成果转化,实现创新价值落地。在技术研发与成果应用衔接阶段,主导制定 “技术 - 产品 - 市场” 转化路径,推动研发团队与生产部门深度协同,带领市场团队对接重点客户,开展定制化技术服务与产品试用,收集应用反馈并推动技术迭代优化。
曾获国家科技奖励情况:无 - 姓名:华志广
排名:4
行政职务:无
技术职称:教授
工作单位:西北工业大学
对本项目技术创造性贡献:研究不同环境温度、散热条件对电机模型的影响,通过搭建小型实验平台,采集边界条件下的温度数据,修正模型中的散热系数参数,为温度场预测精度提升提供数据支撑,对应创新点1“温度场预测精度”指标,证明材料见附件一(1)。
曾获国家科技奖励情况:无 - 姓名:赵冬冬
排名:5
行政职务:无
技术职称:教授
工作单位:西北工业大学
对本项目技术创造性贡献:研究电机效率与扭矩密度的权重分配优化,设计正交实验方案,确定不同工况下的最优权重系数,解决算法在部分工况下效率与扭矩密度失衡问题,助力功率密度达到4.2kW/kg,对应创新点1“功率密度”指标,证明材料见附件一(1)。
曾获国家科技奖励情况:无 - 姓名:闫星辉
排名:6
行政职务:无
技术职称:副教授
工作单位:西北工业大学
对本项目技术创造性贡献:参与极端工况测试样品制备,完成驱动机构样品的组装与调试,重点保障散热部件的装配精度。在寿命测试阶段,负责搭建温度实时采集系统,采用高精度温度传感器记录一次关键部位温度,为寿命评估提供原始数据,对应创新点1“机构寿命”指标。
曾获国家科技奖励情况:无 - 姓名:任虹霞
排名:7
行政职务:无
技术职称:高级工程师
工作单位:西安微电机研究所有限公司
对本项目技术创造性贡献:负责多场耦合模型硬件测试平台搭建,根据模型验证需求,设计包含温度采集、扭矩测量、数据存储的综合测试系统,选用高精度测试仪器,完成电路原理图绘制与硬件组装,解决测试过程中数据同步采集问题,保障温度场预测精度测试顺利开展。
曾获国家科技奖励情况:无 - 姓名:吕永卫
排名:8
行政职务:副总经理
技术职称:高级工程师
工作单位:陕西科技控股集团有限责任公司
对本项目技术创造性贡献:按照国家标准搭建电机性能测试平台,完成优化前后电机的持续输出扭矩、功率密度对比测试,精确测量电机在不同负载下的输出特性,验证功率密度提升效果,对应创新点1“功率密度”指标。
曾获国家科技奖励情况:无 - 姓名:罗兵
排名:9
行政职务:无
技术职称:工程师
工作单位:西北工业大学
对本项目技术创造性贡献:构建带有权重系数的电机总损耗模型,分析电机铜损、铁损、机械损耗的占比规律,建立损耗与运行参数的关联方程,确定各损耗成分的权重系数,实现电机效率提升至98.1%,对应创新点2“电机效率”指标。
曾获国家科技奖励情况:无 - 姓名:李中军
排名:10
行政职务:总经理
技术职称:正高级工程师
工作单位:西安微电机研究所有限公司
对本项目技术创造性贡献:负责设计扩张状态观测器以抑制转矩脉动,针对传统机构中直流与低频扰动难以观测的问题,优化观测器的扩张状态变量设计,通过仿真分析确定观测器参数,解决扰动观测延迟问题。经实验验证,该观测器使电机转矩脉动减少21%,对应创新点2“转矩脉动”指标。
曾获国家科技奖励情况:无 - 姓名:彭庆
排名:11
行政职务:无
技术职称:高级工程师
工作单位:西安微电机研究所有限公司
对本项目技术创造性贡献:提出基于转矩前馈控制的高频响转矩控制方法,分析传统闭环反馈控制的延迟原因,设计前馈控制补偿模块,将转矩指令提前输入控制回路,优化控制信号传输路径。通过搭建动态响应测试平台,测量控制方法的阶跃响应时间,实现动态响应提高67.2%,对应创新点2“动态响应”指标。
曾获国家科技奖励情况:无 - 姓名:周建新
排名:12
行政职务:无
技术职称:高级工程师
工作单位:西安微电机研究所有限公司
对本项目技术创造性贡献:搭建损耗测试平台,在不同电压、频率工况下,测量电机输入输出功率,计算实际损耗值,对比模型预测值与实际值的偏差,为模型权重系数优化提供依据,对应创新点2“电机效率”指标。
曾获国家科技奖励情况:无 - 姓名:冯岗
排名:13
行政职务:主任助理
技术职称:高级工程师
工作单位:西安微电机研究所有限公司
对本项目技术创造性贡献:提出基于多时间尺度理论的在线参数辨识方法,针对电气与机械动态强耦合问题,将辨识过程分为快速电气时间尺度与慢速机械时间尺度,设计分层自适应观测器,解决单一时间尺度模型收敛慢、精度差的问题。经测试,参数总体辨识精度≥98%,对应创新点3“参数辨识精度”指标。
曾获国家科技奖励情况:无 - 姓名:刘康
排名:14
行政职务:副总经理
技术职称:工程师
工作单位:陕西科技控股集团有限责任公司
对本项目技术创造性贡献:设计前馈补偿与反馈控制结合的扰动抑制机制,分析复合扰动的特性,建立扰动预测模型,通过前馈补偿提前抑制可预测扰动,反馈控制处理残余扰动,解决传统方法抑制能力有限的问题。经极端工况测试,失稳风险降低至10%,对应创新点3“极端工况失稳风险”指标。
曾获国家科技奖励情况:无 - 姓名:刘杰
排名:15
行政职务:主任
技术职称:高级工程师
工作单位:西安微电机研究所有限公司
对本项目技术创造性贡献:融合辨识与抑制技术建立状态预测模型,将参数辨识结果实时输入预测模型,优化电流控制算法,减少模型失配与扰动对电流的影响。经测试,交轴与直轴电流误差分别下降36%与67%,整体控制精度提升15%,对应创新点3“控制性能”指标。
曾获国家科技奖励情况:无
|
| 主要完成单位及创新推广贡献: | - 单位名称:陕西科技控股集团有限责任公司
单位贡献:作为本项目的第一完成单位,陕西科技控股集团有限责任公司主要负责本项目组织管理、统筹协调、核心算法与系统集成开发以及保证科研资金的投入等,率先在机器人核心部件研发中应用本项目研究成果,牵头推进智能电驱动机构多物理场协同设计技术在省内多个高端装备制造与智能机器人工程建设项目中应用实践,取得了良好的示范效应,并为项目的运转提供后勤保障和资源调配,推进了项目的有序进行,对本项目技术进行推广和产业应用,对本项目的主要贡献有:
1.设计了基于多时间尺度理论的参数辨识方法,为系统的高精度控制提供了坚实的理论模型基础;
2.突破了复杂扰动环境下状态预测的关键技术显著提升了电驱动机构在不确定扰动下的观测精度和鲁棒性;
3.将相关研究成果推广应用到机器人关节中,有效增强了机器人在复杂工况下的性能,拓展了技术的工程应用范围。
- 单位名称:西北工业大学
单位贡献:项目合作单位,充分发挥高校在基础理论研究方面的优势,研发了一体化电-磁-热多场耦合建模与多目标优化技术,主要负责项目的状态预测与参数辨识核心算法研发,智能驱动控制技术路线制定,为项目的创新和应用做出了以下重要贡献:
1.突破了机器人关节驱动领域的关键技术瓶颈,首创了智能电驱动机构多物理场协同设计与优化方法,解决了高功率密度、高动态响应与热管理之间的协同难题;
2.实现了从理论模型到工程应用的完整技术闭环,将研发技术成功应用于多个省级重点工程和机器人产品中,验证了其先进性与可靠性,形成了显著的示范效应;
3.构建了完备的研发支撑体系,通过高效的项目管理、充足的资金保障和资源调配,确保了多学科交叉研究的顺利进行,为技术的持续创新与迭代提供了坚实基础。
- 单位名称:西安微电机研究所有限公司
单位贡献:项目合作单位,发挥其在特种电机系统与高精度伺服驱动方面的技术优势,开展了面向复杂任务场景的机器人电驱动机构核心技术研究,主要负责制定高过载高动态响应总体技术方案,高爆发机器人关节研究内容和目标,其对项目的创新和应用做出了如下贡献:
1.突破了高爆发智能电驱动系统的核心控制瓶颈,提出了基于自抗扰控制的高频响转矩控制策略,显著提升了电驱动机构在复杂任务下的动态响应性能与抗干扰能力;
2.研发了高效的损耗优化控制技术,确保了电驱动机构在极端工况下的可靠运行与长寿命;
3.将所研发的高动态、高过载驱动技术应用于具体产品开发,推动了项目成果的落地转化。
|
| 完成人合作关系说明: | 完成人合作关系说明:1
|
