| 学科专业评审组: | 机械组 | | 项目名称: | 双模起降近程战术无人机系统 |
| 提名单位: | 中共陕西省委军民融合发展委员会办公室 |
| 提名等级: | 二等奖 |
| 提名单位意见: | 近程无人机作为空中作业平台,凭借其部署灵活、机动性高、作业时效性强等优势,在灾情动态监测、长输管线巡察、重点区域无人值守等民用领域得到广泛应用。然而,当前行业主流近程无人机仍面临三大核心技术瓶颈,严重阻碍其效能升级:一是起降模式固化,对复杂地形的环境适应性不足,难以突破场景限制;二是火箭助推发射技术依赖火工品,运输使用安全风险高,单次任务成本高,制约规模化应用;三是传统控制算法无法适配公路、山地机场等有限场域的滑跑起降需求。为破解行业痛点,2012年以来,西安爱生技术集团有限公司联合西北工业大学成功研制双模起降近程战术无人机系统,攻克三项关键技术:(1)首创240kg量级无人机滑跑起降与气压弹射起飞/伞降回收双模兼容的总体设计,实现“一机能适多场”;(2)研发盘旋陡降着陆控制技术,大幅提升复杂地形下的着陆精度与安全性;(3)创新三段式滑轨结构,解决240kg量级无人机高可靠气压弹射的难题。上述技术解决了复杂环境下无人机多模式起降兼容的行业共性问题,为近程无人机向“全场景、高可靠、低成本”应用提供了重要技术支撑。
该成果技术路线先进、实用性强,对推动无人机行业技术升级与应用具有重要作用,有广阔的应用前景和推广价值。该成果材料齐全、规范,无知识产权纠纷,人员排序无争议,符合陕西省科学技术进步奖提名条件。 |
| 项目简介: | 

|
| 客观评价: | 

|
| 应用情况和效益: | 
|
| 主要知识产权和标准规范等目录: | 

|
| 主要完成人: | - 姓名:马春浩
排名:1
行政职务:副主任
技术职称:高级工程师
工作单位:西安爱生技术集团有限公司
对本项目技术创造性贡献:飞机技术负责人,主持完成无人机方案、初步和详细设计。
对创新点1的贡献,创新采用 “自适应配平油箱 + 纵向自适应控制” 协同方式,结合机身和翼面结构一体化设计、起降装置模块化设计,创建双模起降装置兼容布局型式,达到气动效率高、双模转时间短(≤10min)效果;针对无人机高弹射速度要求,创新采用三段式滑轨结构,结合机翼局部强度优化设计,限制弹射瞬时最大10g过载,解决了240kg量级无人机的安全发射难题。
授权1项发明专利,其中专利为:一种模块化任务舱门及其应用,专利号:ZL202110622080.4。
佐证材料见附件3-1、3-10至3-15、3-21至3-26.
曾获国家科技奖励情况:无 - 姓名:张剑锋
排名:2
行政职务:副总经理
技术职称:副研究员
工作单位:西安爱生技术集团有限公司
对本项目技术创造性贡献:对创新点1作出贡献,创新设计盘旋陡降着陆控制算法,滑跑着陆的进场航线由原来3km缩短至1km以内,解决了山地机场等受限场域下的安全起降问题;优化设计L1航迹控制与能量控制融合算法,实现航迹控制精度小于1m,显著提高航迹控制精度和抗风能力,解决近程无人机复杂场域起降难题。
授权2项发明专利:(1)一种常规布局通用型无人机全自动离地起飞控制方法,专利号:ZL202010964388.2;(2)一种滑跑起降型无人机无动力全自迫降方法,专利号:ZL202010999593.2。
佐证材料见附件1-1、1-2、3-6、3-7、3-8、3-9、3-10至3-15.
曾获国家科技奖励情况:2023年“无人飞行器风险识别、灵巧与安全操控关键技术及应用”荣获中国仪器仪表学会科技进步奖一等奖,个人排名第9,证书编号为CIS/KJJB-2023-1-08R9。 - 姓名:贾兆虎
排名:3
行政职务:副总经理
技术职称:副研究员
工作单位:西安爱生技术集团有限公司
对本项目技术创造性贡献:负责项目的立项论证,主持完成无人机系统的总体方案设计,飞机的总体方案设计等。
对创新点1作出贡献,研究双模无人机系统的模块化设计,快速换装,总体气动布局,重量重心总体设计等。
佐证材料见3-10至3-15、3-21至3-26.
曾获国家科技奖励情况:无 - 姓名:鲁希团
排名:4
行政职务:无
技术职称:正高级工程师
工作单位:西安爱生技术集团有限公司
对本项目技术创造性贡献:负责并完成了地面控制站总体方案设计与详细设计。
对创新点4作出贡献,设计无协议、去中心、相互隔离的多通道传输总体架构,结合自校验支路数据流特征分析的方法,实现测控数据流多通道分配与自主切换传输,依托多通道传输架构,通过叠加多重自校验、自主提示等功能,实现地面站核心控制器多通道编码数据冗余传输,达到“数据传输容故能力提升2至3倍、时延减少至毫秒级”效果。
授权发明专利2项:(1)一种无人机测控信号分配器及分配方法,专利号:ZL201510018305.X;(2)一种具有自校验功能的多余度手摇天线操控盘,专利号:ZL202010754730.6
佐证材料见附件3-3、3-4、3-10至3-15.
曾获国家科技奖励情况:2011年 “中程通用无人机模拟训练器”荣获省部级科学技术进步奖三等奖,个人排名第四,证书编号为2011GFJBJ3265-R04。 - 姓名:刘洋
排名:5
行政职务:无
技术职称:正高级工程师
工作单位:西安爱生技术集团有限公司
对本项目技术创造性贡献:负责地面站系统软件需求分析和设计,软件接口设计等。对创新点1作出贡献,负责双模回收航线规划研究以及软件设计;对创新点4作出贡献,负责无协议、去中心、相互隔离的多通道传输软件总体架构设计。
授权发明专利1项:一种适用于双模回收的无人机航线自动生成方法,专利号:ZL 201910205720.4.
佐证材料见3-5、3-10至3-15、3-21至3-26.
曾获国家科技奖励情况:无 - 姓名:沈延航
排名:6
行政职务:无
技术职称:高级工程师
工作单位:西安爱生技术集团有限公司
对本项目技术创造性贡献:负责飞机平台气动构型设计和飞发桨匹配设计。对创新点3有直接贡献,创新构建基于全剖面飞行动力需求的螺旋桨多工况综合效率表征架构,突破定距螺旋桨多设计点兼容气动布局设计技术,解决了定距螺旋桨宽速、宽压下的桨-发高效匹配难题,相对单设计点螺旋桨,实现全空域动力装置可用功率输出提高12.6%,满足双模起降无人机多状态点飞行性能要求。
授权发明专利1项:一种基于BP神经网络的螺旋桨多工况优化设计方法,专利号:ZL202210362148.4。
佐证材料见1-3、3-10至3-15.
曾获国家科技奖励情况:2023年“XXXX无人机系统”荣获省部级科学技术进步奖二等奖,个人排名第五,证书编号为2022GFJBJ2159-R05。 - 姓名:李兢尧
排名:7
行政职务:副总经理
技术职称:副研究员
工作单位:西安爱生技术集团有限公司
对本项目技术创造性贡献:负责地面站总体方案论证、概念及初步设计。
对创新点4作出贡献,负责地面站多通道数据传输架构的论证与初步方案设计。
佐证材料见附件3-10至3-15、3-21至3-26.
曾获国家科技奖励情况:无 - 姓名:李政辉
排名:8
行政职务:无
技术职称:高级工程师
工作单位:西安爱生技术集团有限公司
对本项目技术创造性贡献:工艺总师,负责无人机研制工艺总方案制定与实施,工艺装备设计与研制,重点解决无人机一体化复合材料结构研制,无人机装配与调试中的工艺装备研制难题。
对创新点2的贡献,创建组合阴模控制和“金属棒+硅橡胶”的组合芯模技术、复合材料整体压力垫定位及“软-硬”模组合的共固化工艺技术。
授权发明专利1项:一种小型无人机复合材料垂直尾翼成型工艺方法,专利号ZL201910593015.6。
佐证材料见附件3-2、3-10至3-15.
曾获国家科技奖励情况:无 - 姓名:侯泊江
排名:9
行政职务:副主任
技术职称:高级工程师
工作单位:西安爱生技术集团有限公司
对本项目技术创造性贡献:项目控制系统设计师,设计了双模构型下无人机飞行控制律,完成了飞行仿真工作。
对创新点1作出贡献,针对高精度航迹控制算法、盘旋陡降着陆算法,设计工程可实现的飞行控制律,并通过系统仿真验证控制律的鲁棒性。
授权2项发明专利:(1)一种常规布局通用型无人机全自动离地起飞控制方法,专利号:ZL202010964388.2;(2)一种滑跑起降型无人机无动力全自迫降方法,专利号:ZL202010999593.2。
佐证材料见附件1-1、1-2、3-10至3-15.
曾获国家科技奖励情况:无 - 姓名:龚麟
排名:10
行政职务:无
技术职称:工程师
工作单位:西安爱生技术集团有限公司
对本项目技术创造性贡献:负责机载飞控计算机的系统设计工作,对创新点1作出贡献,设计一种余度飞控计算机的通道选择方法,大幅提升无人机系统的飞行安全;针对无人机盘旋陡降控制需求,提出盘旋陡降航电系统设计策略,通过实时的机载传感器数据自适应控制无人机陡降速率,大幅缩短系统进场航线距离,提升系统复杂受限场域下的适应性。
佐证材料见附件3-10至3-15、3-24至3-26.
曾获国家科技奖励情况:无
|
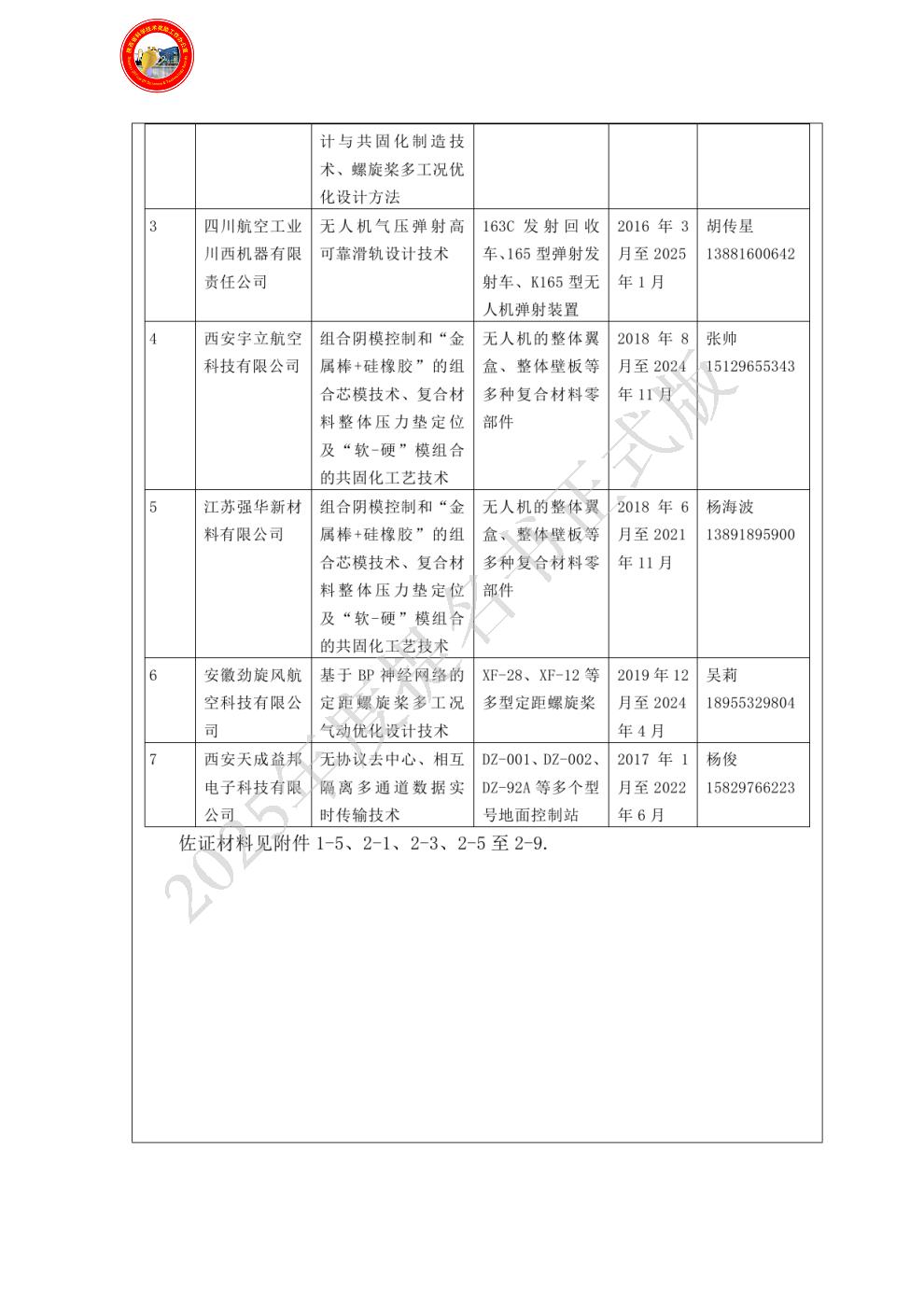
| 主要完成单位及创新推广贡献: | - 单位名称:西安爱生技术集团有限公司
单位贡献:西安爱生技术集团有限公司作为项目主要负责单位,负责项目投标,项目论证、概念设计、初步设计、详细设计、系统试验与验收工作,并对滑跑起降和弹射起飞/伞降回收双模起降总体设计技术、240kg量级无人机气压弹射技术、无人机盘旋陡降着陆控制技术、组合阴模控制和“金属棒+硅橡胶”的组合芯模技术、复合材料整体压力垫定位及“软-硬”模组合的共固化工艺技术以及地面站无协议去中心、相互隔离多通道数据实时传输技术等关键技术做出直接贡献,并将该成果推广并应用至多个无人机项目及相关产业链合作单位。
以第一授权人获授权发明专利26项,以第一完成单位组织并公开发表论文文献著作25篇、航标1项,与西北工业大学等多家单位合作,制定并发布国家标准1项、航空工业标准1项。
- 单位名称:西北工业大学
单位贡献:西北工业大学作为项目第二完成单位,组织用户方人员的理论培训,与西安爱生技术集团有限公司联合承担并完成创新点3中定距螺旋桨多设计点兼容气动布局设计的创新工作,并在创新点1中承担无人机控制系统仿真计算,完成无人机不同工况下无人机控制系统模拟仿真,验证无人机多种飞行控制特性,为实现系统核心指标作出贡献。
以第一授权人获授权发明专利1项,以第一完成单位组织并公开发表论文6篇、著作1部,与西安爱生技术集团等多家单位合作,制定并发布国家标准1项、航空工业标准1项。
|
| 完成人合作关系说明: | 完成人合作关系说明:1
|
