| 学科专业评审组: | 计算机与系统科学组 | | 项目名称: | 开放场景规模化机器人智能协同作业关键技术及应用 |
| 提名单位: | 中共陕西省委军民融合发展委员会办公室 |
| 提名等级: | 一等奖 |
| 提名单位意见: | 本单位认真审阅了项目提名书及附件材料,确认所提供的材料真实有效,内容符合填写要求,我单位和项目完成单位都已对该项目的基本情况进行了公示,公示期间无异议。
项目聚焦国家重大需求领域,针对开放场景规模化机器人智能协同作业所面临的空间复杂堆叠、时空动态混杂、协同逻辑交叉等挑战,突破了场景空间关系理解、人机增强高效决策、规模人机协同作业等关键技术,解决了传统规模化机器人系统协作方式僵化、协作效率低、开放时空场景适用性差等问题,形成了开放场景规模化机器人智能协同理论与方法体系,提升了规模化机器人-人协同作业效率,推动了产业化应用。本成果开发了开放场景规模化机器人智能协同作业系统,研发并交付某型贮存输送对接分系统(智慧阵地)2套及智能化生产线8套。相关技术成果应用于14家单位的智能制造、智能仓储、智能交通、集群协同训练平台等生产线或系统,直接经济效益4.948亿元。成果技术难度大,实现了重大自主创新,拥有多项自主知识产权,解决了国防领域开放场景的重大需求,总体技术达到国际先进水平,部分技术达到国际领先水平。市场前景广阔、经济价值显著、国防效益重大。
经审查,成果材料规范,无知识产权纠纷,人员排序无争议,符合陕西省科学技术奖提名条件。 |
| 客观评价: | 
|
| 应用情况和效益: | 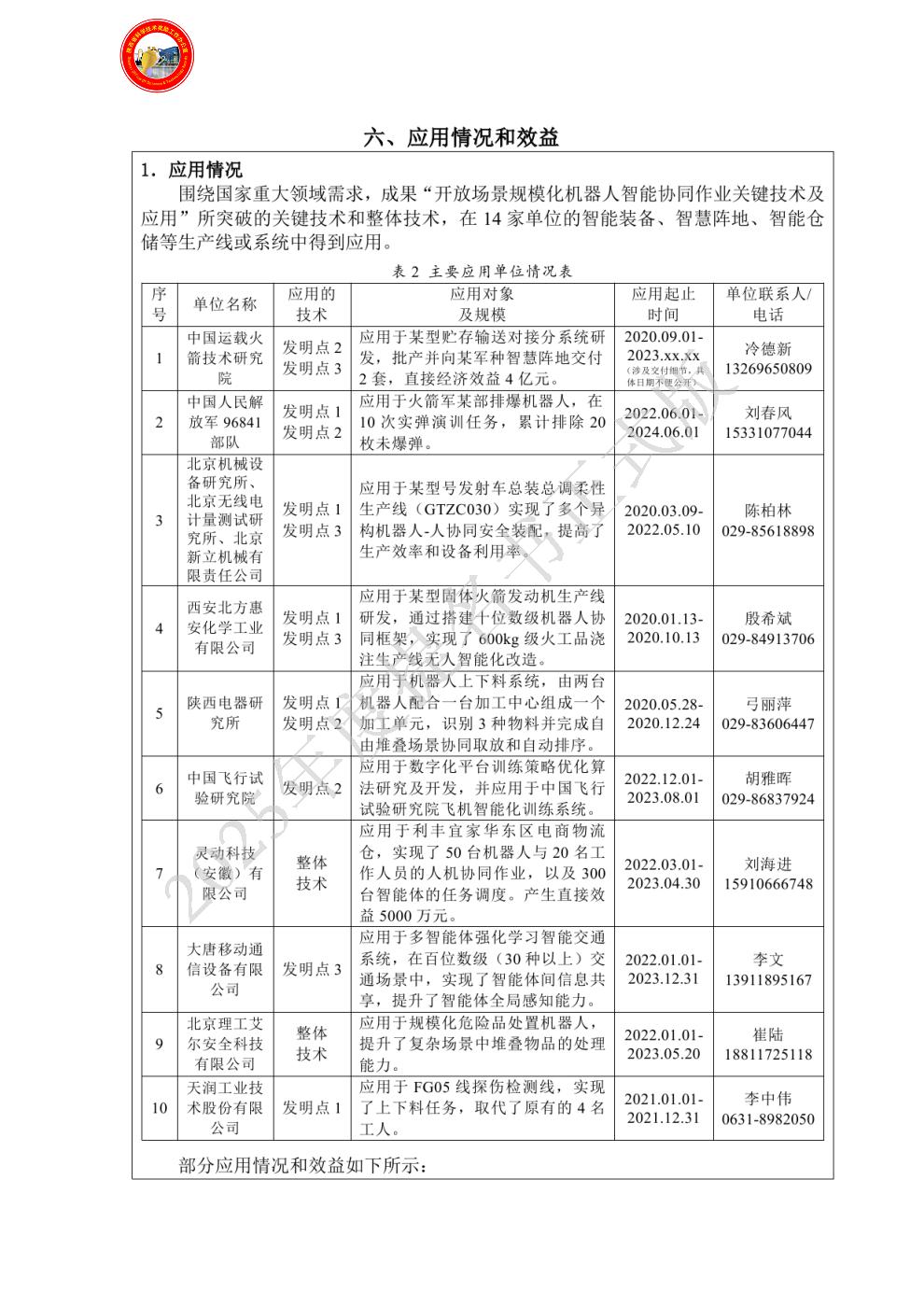
|
| 主要知识产权目录: | 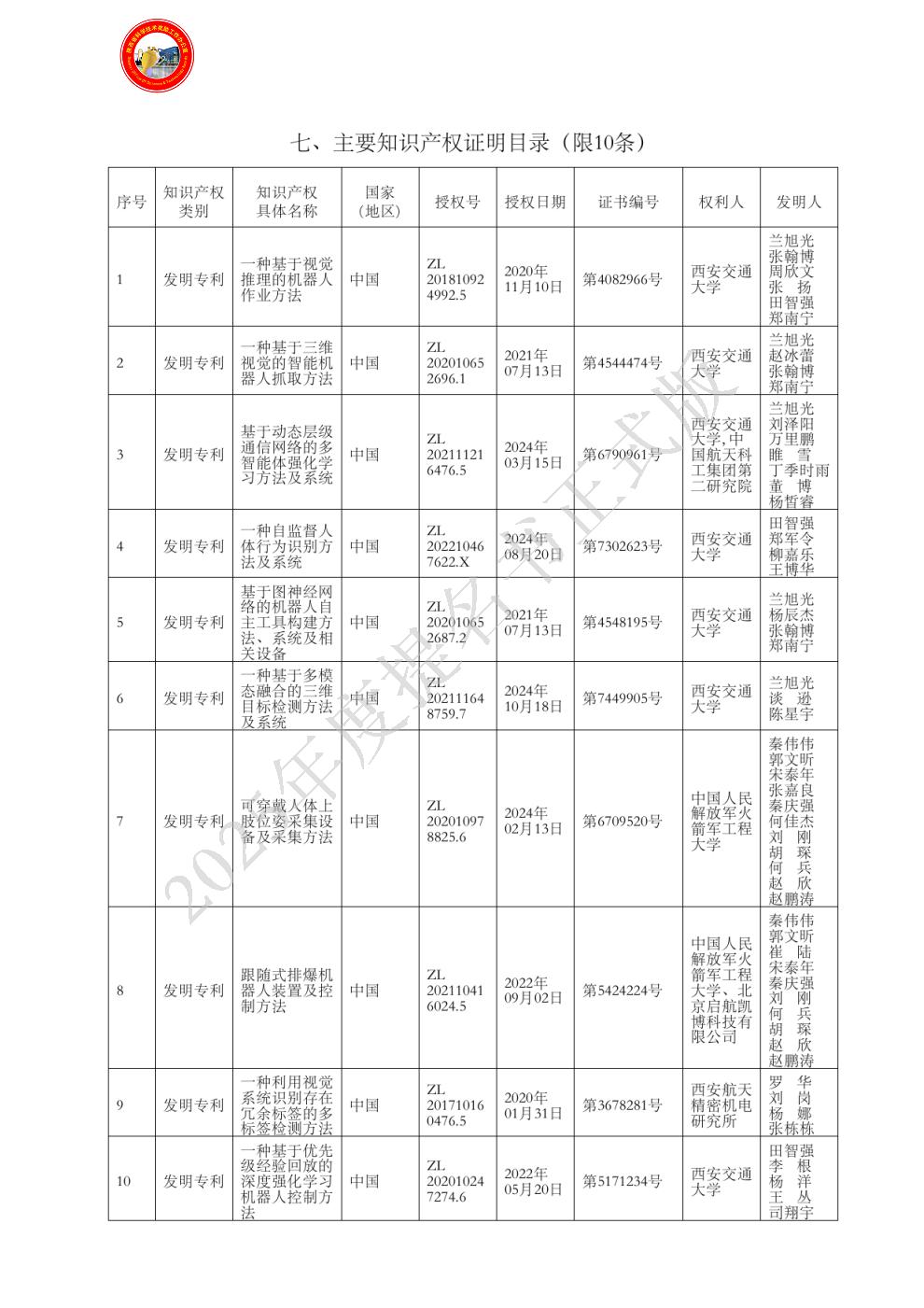
|
| 主要完成人: | - 姓名:兰旭光
排名:1
行政职务:党委书记
技术职称:教授
工作单位:西安交通大学
完成项目时所在单位:西安交通大学
对本项目技术创造性贡献:项目负责人,对项目整体技术有重要贡献,具体贡献详述如下:提出了项目整体技术路线,参与了基于空间推理的动态非结构协作场景理解、空间推理模型驱动的人机增强高效决策范式和规模化机器人空间推理学习与协同作业架构的设计与优化。
- 姓名:秦伟伟
排名:2
行政职务:室副主任
技术职称:教授
工作单位:中国人民解放军火箭军工程大学
完成项目时所在单位:中国人民解放军火箭军工程大学
对本项目技术创造性贡献:空间推理模型驱动的人机增强高效决策范式技术负责人,对“主要技术发明”中技术发明点2做出了主要贡献,具体贡献详述如下:设计了基于人类知识增强的目标导向操作优先规划方法,自主设计并研发了多款人机增强智能机器人原型系统。此外,还参与了该项目部分成果的应用验证以及推广转化工作。
- 姓名:刘岗
排名:3
行政职务:无
技术职称:研究员
工作单位:西安航天精密机电研究所
完成项目时所在单位:西安航天精密机电研究所
对本项目技术创造性贡献:规模化机器人空间推理学习与协同作业架构技术负责人,对“主要技术发明”中技术发明点3做出了主要贡献,具体贡献详述如下:开发了规模化机器人学习与协同作业系统,设计了基于规模化机器人感知、理解、推理、协同、管控调度的集成系统,并将此系统应用于某型号装备高效贮存与智能快速出库。
- 姓名:陈星宇
排名:4
行政职务:无
技术职称:讲师
工作单位:西安交通大学
完成项目时所在单位:西安交通大学
对本项目技术创造性贡献:规模化机器人空间推理学习与协同作业架构技术主要完成人,对“主要技术发明”中技术发明点3做出了主要贡献,具体贡献详述如下:设计了基于多模态交互式模型的多智能体分层策略学习机制。此外,还参与了该项目部分成果的应用验证以及推广转化工作。
- 姓名:田智强
排名:5
行政职务:无
技术职称:教授
工作单位:西安交通大学
完成项目时所在单位:西安交通大学
对本项目技术创造性贡献:基于空间推理的动态非结构协作场景理解技术主要完成人,对“主要技术发明”中技术发明点1做出了主要贡献,具体贡献详述如下:提出了任务-意图-注意力联合行为意图表示和基于协作者意图理解的人机协作方法,优化了基于空间推理的动态非结构协作场景理解方法。
- 姓名:郭文昕
排名:6
行政职务:无
技术职称:助理工程师
工作单位:中国人民解放军火箭军工程大学
完成项目时所在单位:中国人民解放军火箭军工程大学
对本项目技术创造性贡献:空间推理模型驱动的人机增强高效决策范式技术主要完成人,对“主要技术发明”中技术发明点2做出了主要贡献,具体贡献详述如下:优化了基于人类知识增强的目标导向操作优先规划方法,参与研发了多款人机增强智能机器人原型系统。
|
| 主要完成单位情况: | - 单位名称:西安交通大学
单位贡献:项目完成单位西安交通大学作为牵头单位,重点开展总体方案论证、理论攻关和关键技术突破。针对开放场景规模化人-机-物协作领域公认的国际难题,开展规模化机器人智能协同作业关键技术研究,解决了基于空间推理的动态非结构协作场景理解、空间推理模型驱动的人机增强高效决策、规模化机器人空间推理学习与协同作业等瓶颈难题,突破了空间推理与理解、最优自主规划和人机高效协作等关键技术。特别是:(1)针对人-机-物时空混杂开放环境下空间推理及人体行为意图理解难题,阐明了动态非结构协作场景机器人空间推理机制,开创性地提出了操作对象间关联关系、属性、功能推理等与操作之间的深度图网络模型,构建了世界首个机器人操作关系数据集VMRD;(2)针对时空混杂环境中高度不确定性状态给机器人自主决策带来的瓶颈难题,创新性提出了空间推理模型驱动的人机增强高效决策范式,有效提升了复杂协作场景中人体意图预测的鲁棒性和泛化性,提高了人机协作的安全和作业效率。联合火箭军工程大学和西安航天精密机电研究所进行了系统研发,为后续推广应用提供理论与技术支持。
- 单位名称:中国人民解放军火箭军工程大学
单位贡献:项目完成单位火箭军工程大学主要完成原理样机研制及部队推广有关工作,针对空间推理驱动的人机增强决策范式缺失问题,设计了基于自然语言交互的人机增强空间推理决策范式。通过构建部分可观测马尔可夫决策过程,实现机器人自主提问,交互式引入外部知识,消除场景中不完备观测产生的不确定性,实现非结构协作场景的空间推理增强,使机器人能合理自主作业,解决了开放场景下不确定性建模和决策难题。联合西安交通大学和西安航天精密机电研究所研发了多款人机增强智能机器人原型系统。通过在实际应用场景中面对突发状况时的表现,迭代更新算法策略,确保系统在人机协同环境中的应用效能。
- 单位名称:西安航天精密机电研究所
单位贡献:项目完成单位西安航天精密机电研究所重点提供产品研发应用及推广支持,联合西安交通大学和火箭军工程大学,先后在中国运载火箭技术研究院(中国航天科技集团一院及其所属战术武器总体技术部),北京机械设备研究所、北京无线电计量测试研究所、北京新立机械有限责任公司(中国航天科工集团二院203所、206所、699厂),天润工业技术股份有限公司(中国规模最大、世界第二大曲轴生产企业),西安北方惠安化学工业有限公司、陕西电器研究所等单位推广应用项目研发成果,在节省了大量人力成本的同时,还显著提升了规模化机器人协同作业的可靠性和效率,节省了大量的时间成本,给制造业带来巨大的经济效益。项目研究具有广阔的市场前景、经济价值和国防效益。
|
| 完成人合作关系说明: | 完成人合作关系说明:1
|
