| 学科专业评审组: | 机械组 | | 项目名称: | 卫星激光通信快准稳指向核心技术与器件 |
| 提名单位: | 中共陕西省委军民融合发展委员会办公室 |
| 提名等级: | 一等奖 |
| 提名单位意见: | 该项目紧密围绕空天信息基础设施建设及其科技产业发展需求,针对在轨卫星之间高速率高通量激光通信过程中超远距离、超高精度激光指向调节的难题和国外严格的技术和产品封锁,研制了兼具快-准-稳的光束指向调节系列关键器件、发展了相应指向控制驱动技术。该技术书已实现多型、多类高精度指向调节器件的在轨运行,为卫星互联网高速发展奠定了坚实基础。
该项目在技术创新性方面取得了如下突破。面向卫星星间激光通信组网的迫切需求和国外严格技术和产品封锁,研发了兼具快-准-稳的光束指向调节高精度跟瞄关键技术,研发了具有自主知识产权的光路高精度指向器件及其控制驱动技术;实现了在轨运行,并显著提升了光束捕获、瞄准与跟踪的精度与稳定性。项目技术自主可控,关键指标达到国际先进水平。
该项目在转化推广应用中取得了显著成效,相关技术以专利转让形式实现了科技成果转化并落地我省西安市航天基地。相关技术已经应用于我国星网低轨卫星、星网高轨卫星和北斗卫星激光通信,形成了经济效益,该发明突破了关键器件研制和生产的国产化瓶颈,推动了空天通信、精密仪器及相关产业的技术升级,在保障国家信息安全、支撑卫星互联网建设等方面发挥了重要作用,推动了我省在激光通信与高端精密作动器领域的产业布局。
综上所述,该项目成果技术创新性强,应用效益显著,社会与战略贡献突出,完全符合陕西省技术发明奖的授奖条件。建议授予“陕西省技术发明奖一等奖”。
|
| 客观评价: | 
|
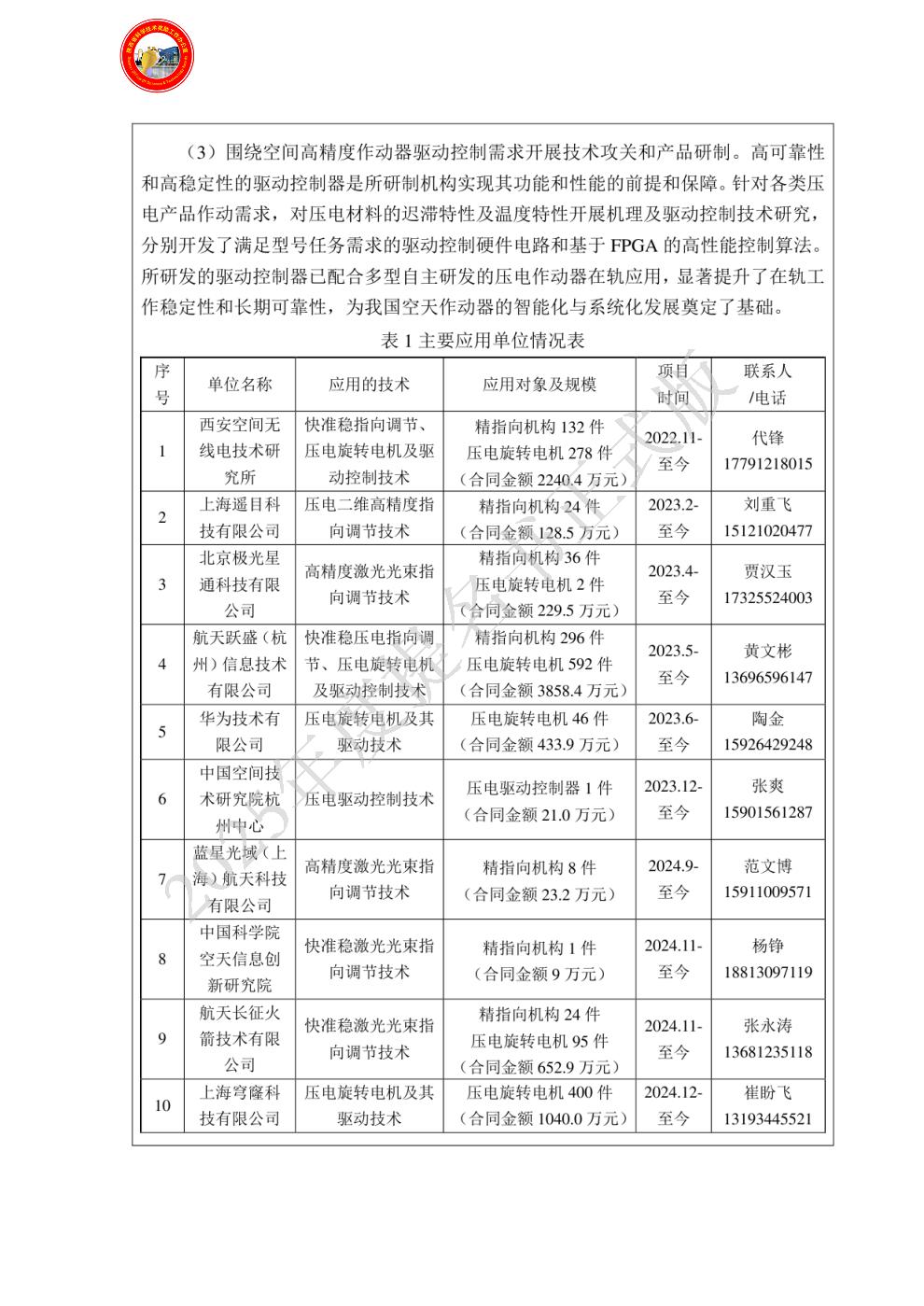
| 应用情况和效益: | 
|
| 主要知识产权目录: | 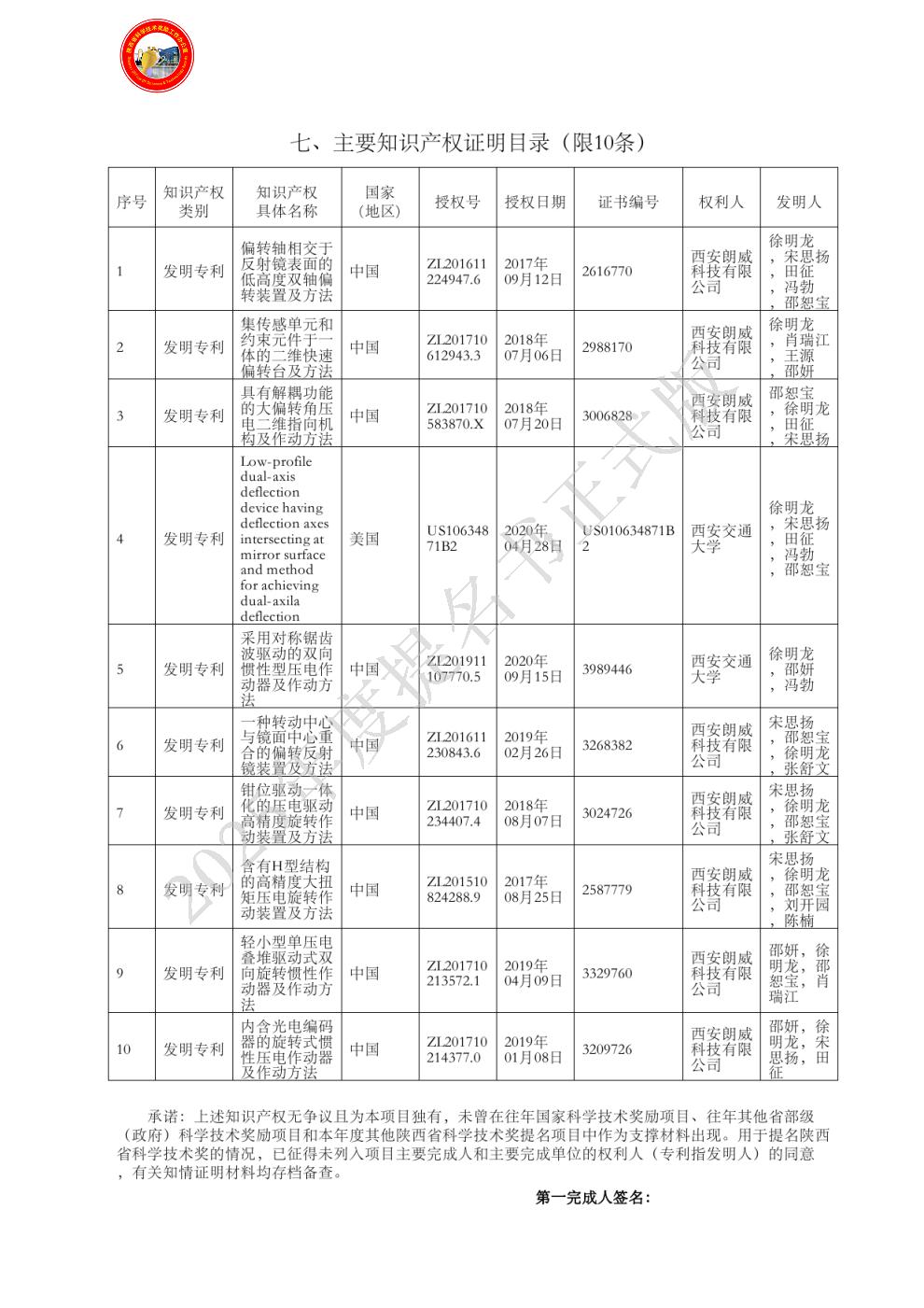 |
| 主要完成人: | - 姓名:徐明龙
排名:1
行政职务:复杂服役环境重大装备结构强度与寿命全国重点实验室 副主任
技术职称:教授
工作单位:西安交通大学
完成项目时所在单位:西安交通大学
对本项目技术创造性贡献:(1)项目负责人,是发明点1、2、3和4的核心贡献者,是压电驱动融合建模理论的主要贡献者,是快响应高精度精指向机构优化设计方法的主要研究者,是宇航级精指向机构器件的主要发明者,是该类产品规模化和产业化的领导者,是产品在轨应用的推动者。
(2)佐证材料:附件1-1~1-3,附件6-11,附件6-12,附件7-1~7-7。
- 姓名:邵恕宝
排名:2
行政职务:无
技术职称:研究员
工作单位:西安交通大学
完成项目时所在单位:西安交通大学
对本项目技术创造性贡献:(1)项目主要成员,是发明点1、2、3的核心贡献者,是压电驱动融合理论及前馈补偿与自适应控制策略的提出者,是精指向机构双轴解耦方法的发明者、是高精度压电旋转作动装置的发明者,是高精度驱动控制器硬件的主要研制者,是产品产业化的参加者。
(2)佐证材料:附件1-3,附件6-11,附件6-12,附件7-3,附件7-4,附件7-5。
- 姓名:田征
排名:3
行政职务:无
技术职称:工程师
工作单位:西安交通大学
完成项目时所在单位:西安交通大学
对本项目技术创造性贡献:(1)项目主要成员,是发明点2和4的核心贡献者,是偏转轴相交于反射镜表面的低高度双轴偏转机构的主要发明者,是精指向机构力学环境适应性与服役寿命考核方法的主要设计者,是高精度驱动控制算法软件的主要开发者,是产品产业化的主要推动者。
(2)佐证材料:附件1-1,附件1-3,附件6-11,附件6-12,附件7-1,附件7-7。
- 姓名:李亮
排名:4
行政职务:总经理
技术职称:工程师
工作单位:西安朗威科技有限公司
完成项目时所在单位:西安朗威科技有限公司
对本项目技术创造性贡献:(1)项目主要成员,是发明点3和4的主要贡献者,压电迟滞行为的自适应控制跟踪方法的主要研究者,是钳位驱动一体结构中应力水平优化方法的主要研究者,是成果产业化的核心推动者
(2)佐证材料:附件6-11,附件6-12,附件6-24。
- 姓名:张舒文
排名:5
行政职务:无
技术职称:副教授
工作单位:西安交通大学
完成项目时所在单位:西安交通大学
对本项目技术创造性贡献:(1)项目主要成员,是发明点4的主要贡献者,是压电驱动高精度旋转作动装置中弯扭卸载思路的提出者,是精指向机构抗冲击结构的主要设计者,是产品产业化的主要推动者。
(2)佐证材料:附件6-11,附件6-12,附件6-13,附件7-4。
- 姓名:翟崇朴
排名:6
行政职务:无
技术职称:教授
工作单位:西安交通大学
完成项目时所在单位:西安交通大学
对本项目技术创造性贡献:(1)项目主要成员,是发明点3的主要贡献者,是二维精指向机构自适应控制策略的主要研究者,是纳米级精度直线驱动方法的主要研究者,是产品产业化的主要推动者。
(2)佐证材料:附件6-13。
|
| 主要完成单位情况: | - 单位名称:西安交通大学
单位贡献: 西安交通大学作为第一完成单位,连续十余年与中国航天科技集团各院所持续合作,承担了20余项航天型号任务,针对空间激光通信光束精指向技术与器件需求,通过关键理论创新和核心技术攻关,揭示了压电非线性和结构柔性融合动力学行为规律,提出了大角度快响应指向机构的设计方法,获得了能够补偿力电耦合时变特性与率相关行为的前馈与自适应控制策略,研制了系列化宇航级高速响应指向机构器件,并开发了相应控制算法和的低噪声宇航级控制器,首次实现了该类技术与器件的自主可控,核心指标超越国外同类产品,解决了卫星激光通信光束指向“快准稳”兼顾的难题,并具备了高可靠与长寿命优势,成果实现了产品规模化与产业化。
- 单位名称:西安朗威科技有限公司
单位贡献: 西安朗威科技有限公司作为第二完成单位,通过与西安交通大学进行深度产学研合作,签订科技成果转化,共建精密驱动工程实验室,研发出精指向机构高可靠装配工艺,解决了产品装配应力高和一致性差的问题;研制出高精度地面驱动控制检测设备,提升了产品的质检效率;开发出高鲁棒性宇航级控制算法,实现了精指向机构与控制器的集成。激光通信光束精指向器件已面向星网、联通、华为等国家航天院所与民用航天企业批量出售。
|
| 完成人合作关系说明: | 完成人合作关系说明:1
|
